哈工大全媒体(阚思邈 孟祥和/文 孟祥和/图)近日,机电工程学院谢晖教授团队在微型仿鱼机器人群体协调与靶向药物递送方面取得重要进展,相关研究成果以《仿鱼磁性软体机器人的群体协调:面向高效药物递送的定点富集与形状自适应贴附》(Swarm coordination of fish-like magnetic soft robots: directed aggregation and shape-adaptive attachment toward efficient drug delivery)为题发表在《国家科学评论》(National Science Review)上。相关成果有助于解决体内复杂三维环境中多发病灶的高效药物递送难题,并为微型机器人群体智能的实现提供新的技术路径。
体内病变往往呈现多点散发、立体分布的特征,而单个微型机器人尺寸微小,难以覆盖病变区域,限制了药物递送的效率。因此,需要通过群体协作弥合单个机器人与病变区域范围之间的鸿沟。自然界中,鱼群通过协同行为适应复杂环境,为解决这一问题提供了仿生学启示(图1)。洄游鱼群通过动态聚散穿越复杂通道,觅食鱼群则在特定区域调节形态以覆盖目标。然而,要让机器人在体内环境实现类似的群体协同行为却面临“如何在全局磁场下实现个体差异化控制”“如何调节机器人间的距离避免相互粘连”“如何使机器人群体自适应地贴附于不规则病灶”等诸多挑战。
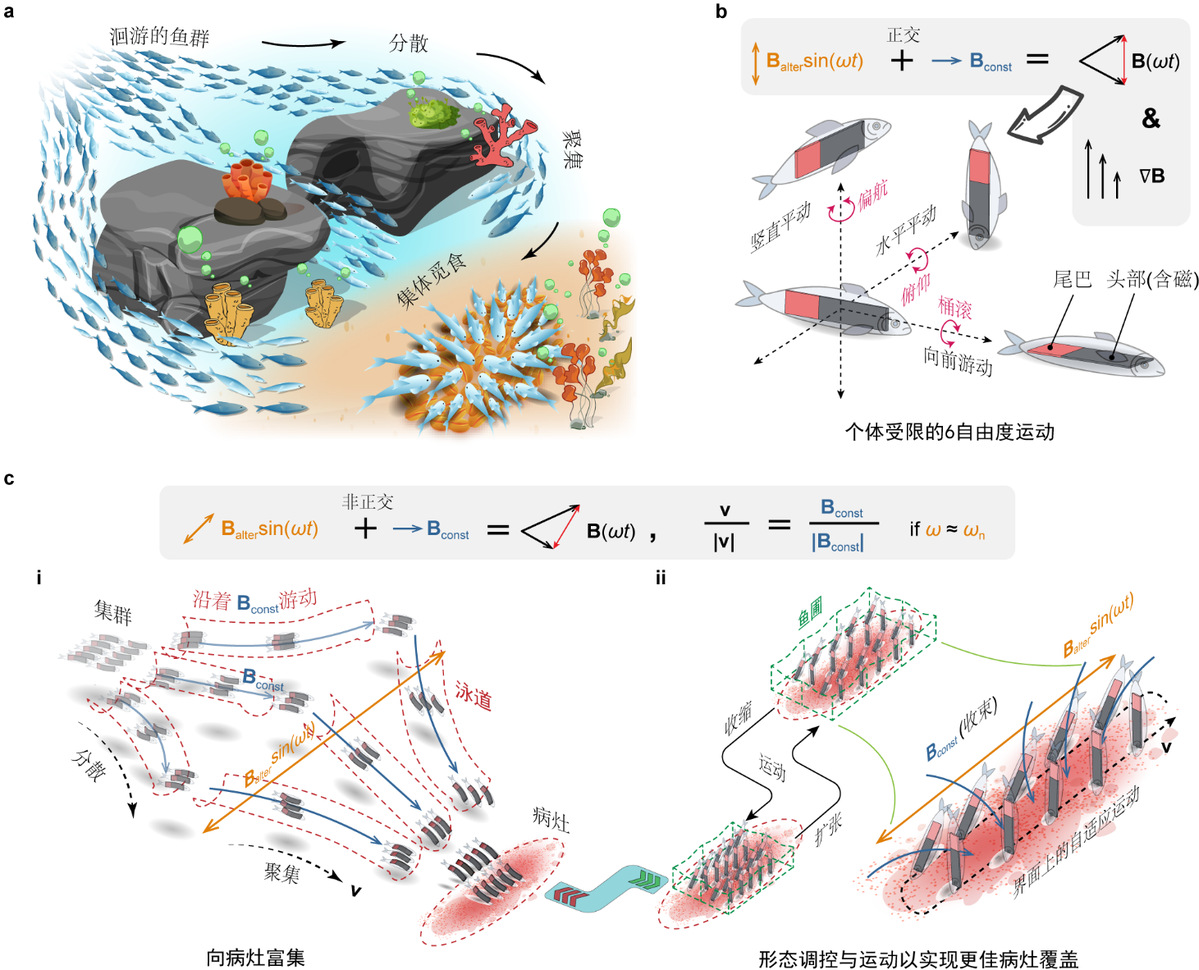
图1 灵活的微型仿鱼磁性软机器人集群向病灶聚集并形状自适应贴附
针对上述问题,研究团队提出微型仿鱼机器人的群体协调方法。研究人员设计了头尾异质结构的微型机器人,通过激光加工实现高通量制备。该研究首次发现当驱动频率接近机器人固有频率时,振荡磁场的恒定分量将完全主导游动方向。基于此发现,团队通过编程恒定磁场分量的空间分布实现个体方向的差异化调控,通过调节交变磁场强度避免机器人相互粘连。机器人可实现全自由度运动,游动速度达每秒20体长。机器人群可在体内三维环境中主动聚散,如同洄游鱼群;到达病灶后,可利用磁场与界面约束调节形态适应病灶轮廓,如同觅食鱼群,实现自适应贴附。
团队开展了丰富的体外验证试验。如图2所示,单个机器人可完成三维物体搬运、逆流游动等任务。在胃部病灶模型中(图3),机器人群成功实现了向病灶定向聚集、调节形态并稳定贴附。团队还展示了机器人群在超声成像引导下的运动控制、抗重力运动等能力。
图2 仿鱼微机器人个体搬运物体
图3 仿生鱼群向病灶聚集并主动调整形态贴附
哈工大机器人技术与系统全国重点实验室为论文唯一单位。谢晖教授、孟祥和副教授、张号副教授为论文共同通讯作者,博士生毛立阳、田陈堯为论文共同第一作者,博士生杨鹏、沈行健为共同作者。该研究获得国家重点研发计划、国家自然科学基金等项目资助。
论文链接:https://doi.org/10.1093/nsr/nwaf429